このロボット教育は,『ロボット開発は高度な技術であり,高価で難しく,手が届かない。』と思われているものを,実は違うんだと伝えることを目標としています.すなわち,高い精度にさえこだわらなければ,創意工夫次第で低価格&簡単に高度な技術を含むロボットが開発できるということを,実演と共に示します.
|
ロボットの簡単製作法
ペットボトルとRCサーボモータをグルーガンで接着するという簡単なロボットデザイン方法で,
『身体性人工知能』や『サイボーグ技術』を体験できます。詳しくは以下の動画をご覧ください。

ペットボトルとRCサーボをグルーガンでくっつける様子.(ビデオ)
なお,ペットボトルで作るロボットの例(開発環境の準備,制御器の作り方)は,
CQ出版の「ペットボトルとH8Tinyで作ろう ぼくらのマイコン・ロボット工作」をご参考に.
|
ペットボトルロボットの実演
(ビデオとなっていますので,画像をクリックしてください.) |

ペットボトルのロボットアーム
(製作費:約10,000円)) |

ペットボトルの階段のぼり
(製作費:約10,000円) |

モータ一個で四脚歩行
(製作費:約5,000円) |
サイボーグ技術の実演
(ビデオとなっていますので,画像をクリックしてください.)
近年注目されるサーボーグ技術を安価・簡単製作し,その本質を理解できます.
すべて「お手製」です. |

表面筋電位(EMG)センサ
(製作費:1,500円) |

EMGセンサ用信号処理回路
(製作費:1,000円) |

筋電モータ制御器
(製作費:約8,000円) |
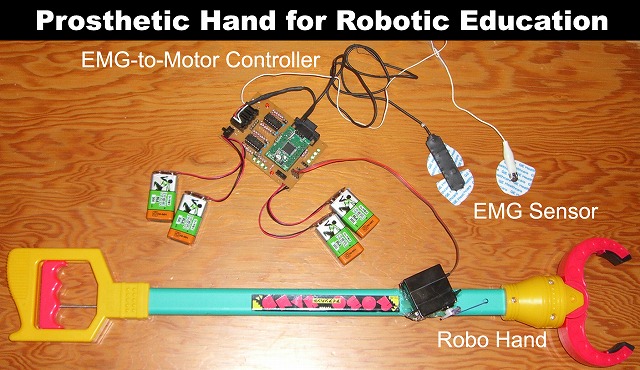
単純筋電義手
(製作費:8,000円) |

じゃんけん筋電義手
(製作費:約15,000円) |

筋電メガネ
(製作費:約8,000円) |
3次元物理シミュレーション「Open Dynamics Engine」
無料で構築できる三次元物理シミュレーションの方法を紹介.
『Visual C++ 2008 Express Edition』&『Open Dynamics Engine』を利用.
詳しくは,<http://www.koj-m.sakura.ne.jp/ode/>をご覧ください.
(以下の画像は,ビデオデモとなっています.) |

ZMP制御型二足歩行ロボット |
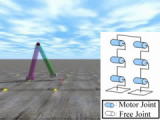
CPG制御型二足歩行ロボット |
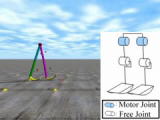
準受動歩行行ロボット |
講演の履歴
①日本ロボット学術講演会一般セッション「ロボティクス若手ネットワーク・オープンセミナー
~君と共に、ロボティクスが拓く未来」にて講演(2007年9月15日)
『インプレスのロボットウォッチ』にて紹介
②静岡県立沼津工業高等学校にて特別講演(2007年12月4日)
12月6日付の静岡新聞で記事掲載
③奈良女子大学附属中等教育学校にてサイエンスカフェ&ものづくり授業
(2008年6月14日~15日)
④経済産業省産学連携人材育成事業「産学人材育成パートナーシップ事業」
茨城地域実証講座「メカトロニクス概論」実習にてものづくり授業(2008年9月13日).
⑤経済産業省産学連携人材育成事業「産学人材育成パートナーシップ事業」
モノづくり技術者共通(経営者体験)コースにてものづくり授業(2008年9月17日).
|
ロボット教育の教材
および,製作されたロボットたち
1.自律移動ロボットの製作
ロボットの制御器および機構をデザインして,身体性人工知能を理解しよう!
授業資料 / 学生たちの製作した移動ロボット群(ビデオ)
2.生体信号でロボットを制御
人と機械をつなぐサイボーグ技術を体験してみよう!
授業資料 / 学生たちの製作した移動ロボット群(ビデオ)
3.光源探索をする準受動四脚移動ロボット
モータ1個で犬型ロボットを動かそう!
さらには,ライトの光に向かって進ませよう!
授業資料 / 製作された移動ロボット(ビデオ:32MB)
|
連絡先
本活動は,中高生に科学技術への興味をもってもらうことを目的としております.
『授業』や『講演』をご希望の方は,松下までEメールでご連絡をお願いします.

|